

This page describes Windchill, Formerly known as Lockdown, Danny's middleweight.

![]() (12-Feb-2002)
Danny couldn't make it to TI-2, so Fuzzy had to drive WindChill for him.
Our draw was a tough little Lexan bot named Armadillo. Armadillo used two
Bosch motors to give him really great ramming speed. Although I thought
WindChill have a good chance, and was able to get the lifting spike under the
opponent, I couldn't keep him from retreating and ramming again.
(12-Feb-2002)
Danny couldn't make it to TI-2, so Fuzzy had to drive WindChill for him.
Our draw was a tough little Lexan bot named Armadillo. Armadillo used two
Bosch motors to give him really great ramming speed. Although I thought
WindChill have a good chance, and was able to get the lifting spike under the
opponent, I couldn't keep him from retreating and ramming again.
Armadillo kept hitting WindChill's right front tire, eventually breaking the 7/16" shaft on the old NPC 31250 motor. This was our first "wheel-ectomy" at TI-2, and was a bad omen for the tourney.
With one wheel gone, WindChill put up a valiant but doomed effort, and lost the decision.
The next time WindChill competes, it will have different motors.
 (6-Aug-01)
Continuing in our working robots tradition, we've also drafted WindChill for use
as a package mover. Click on the photo to the right to see
a 4.3 mb MPEG video of Danny moving
two packages that outweigh him by a significant amount.
(6-Aug-01)
Continuing in our working robots tradition, we've also drafted WindChill for use
as a package mover. Click on the photo to the right to see
a 4.3 mb MPEG video of Danny moving
two packages that outweigh him by a significant amount.
 (2-Aug-01)
As part of our Robotica audition tape, we came up with a useful modular attachment
for WindChill's arm: a broom. We wnvision a new kind of house robot that can
clean the arena floor between rounds. That's one way to guarantee a bot a
lot of time in the box. We have a
2.4 mb MPEG video of the arena sweeper
on our
video page.
(2-Aug-01)
As part of our Robotica audition tape, we came up with a useful modular attachment
for WindChill's arm: a broom. We wnvision a new kind of house robot that can
clean the arena floor between rounds. That's one way to guarantee a bot a
lot of time in the box. We have a
2.4 mb MPEG video of the arena sweeper
on our
video page.
 (11-May-01)
Dan worked on WindChill for two days this week, conquering the radio range problem.
The basic problem is that the Vantec is putting out RF noise that triggers the Futaba
receiver failsafe. The ultimate workaround was the standard piece of plastic
to mount the Dean's antenna. The question is why this is necessary on the smaller
robots, but the bigger robots work fine without the plastic.
(11-May-01)
Dan worked on WindChill for two days this week, conquering the radio range problem.
The basic problem is that the Vantec is putting out RF noise that triggers the Futaba
receiver failsafe. The ultimate workaround was the standard piece of plastic
to mount the Dean's antenna. The question is why this is necessary on the smaller
robots, but the bigger robots work fine without the plastic.
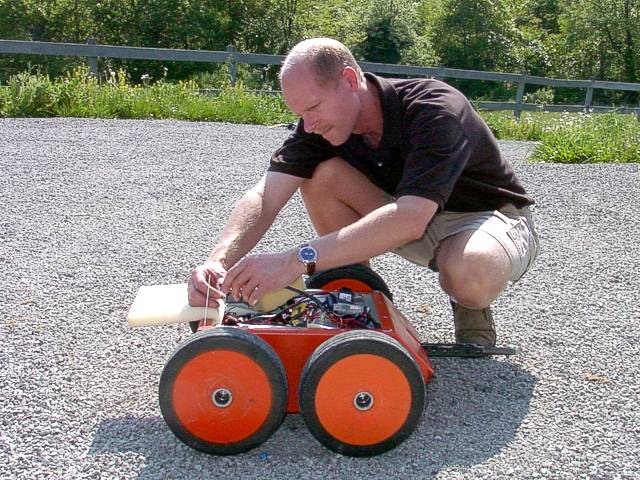
 (8-May-01)
Danny was out driving WindChill last weekend, here we see WindChill dominating the
Tentomushi-like chewtoy rescued from the pile of broken pool-maintenance equipment.
We're still working on the antenna for WindChill...the stock F-connectors for the
rubber duck antenna are too weak for the arena, so we are still trying various antenna
positions.
(8-May-01)
Danny was out driving WindChill last weekend, here we see WindChill dominating the
Tentomushi-like chewtoy rescued from the pile of broken pool-maintenance equipment.
We're still working on the antenna for WindChill...the stock F-connectors for the
rubber duck antenna are too weak for the arena, so we are still trying various antenna
positions.
 (26-Apr-01)
Thanks to my brother-in-law Rob, we got the spike mount (a one inch square mild steel
perf tube) welded to the 35 tooth sprocket. That replaces 4 bolts we were using, strengthening
the ramming capability, and cleaning up the internals (no bolts for wires to catch on).
We also replaced the 3 DeWalt XR+ batteries with 2 Hawker Genesis G13-EPs. I was dissatisfied
with the speed of the NPC-31250 motors, and WindChill was also underweight. I decided that
upping the voltage would provide a little more pep, and the extra weight of the Hawkers
moves the CG back nicely and brings WindChill to a healthy 113.5 pounds.
(26-Apr-01)
Thanks to my brother-in-law Rob, we got the spike mount (a one inch square mild steel
perf tube) welded to the 35 tooth sprocket. That replaces 4 bolts we were using, strengthening
the ramming capability, and cleaning up the internals (no bolts for wires to catch on).
We also replaced the 3 DeWalt XR+ batteries with 2 Hawker Genesis G13-EPs. I was dissatisfied
with the speed of the NPC-31250 motors, and WindChill was also underweight. I decided that
upping the voltage would provide a little more pep, and the extra weight of the Hawkers
moves the CG back nicely and brings WindChill to a healthy 113.5 pounds.

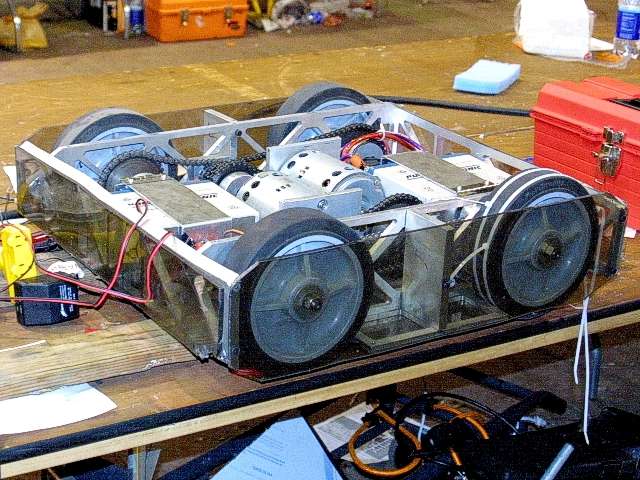
 (22-Feb-01)
Today we took a small step up the evolutionary ladder of weapons by completing the spike mount for
WindChill, our first powered weapon. The angle of the spike is controlled by a powerful Seiko
servo from Vantec. The photo on the right shows how the 27 ft-lb servo drives a 10 tooth pinion
which drives a 35 tooth gear using #35 chain. The 3.5:1 gear reduction, coupled with 50% overvolting
on the servo, gives a theoretical 140 lbs of lifting force at the spike tip.
(22-Feb-01)
Today we took a small step up the evolutionary ladder of weapons by completing the spike mount for
WindChill, our first powered weapon. The angle of the spike is controlled by a powerful Seiko
servo from Vantec. The photo on the right shows how the 27 ft-lb servo drives a 10 tooth pinion
which drives a 35 tooth gear using #35 chain. The 3.5:1 gear reduction, coupled with 50% overvolting
on the servo, gives a theoretical 140 lbs of lifting force at the spike tip.
The 35 tooth gear and the spike rotate on a 3/4" 440C stainless steel shaft held in place by split-shaft collars. The spike is a hardened steel bull-point spike by Bosch, further ground to a needle sharp point.

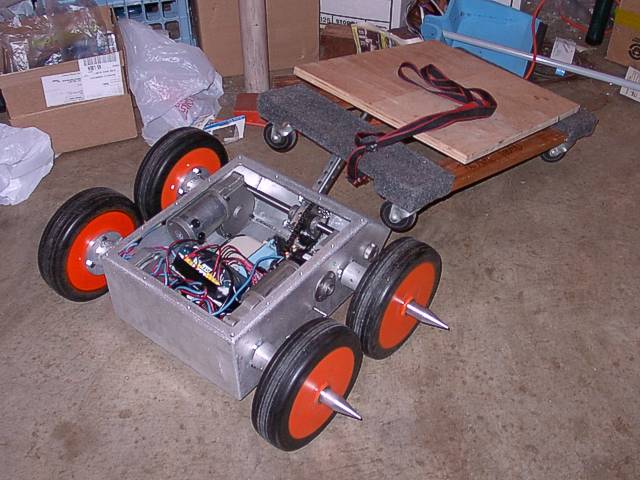 The goal is to give Danny the option to lower the spike all the way to the floor for use as a wedge,
or raise it level to use it as a rammer. Although the mechanics are strong enough to lift the other
bot, the more likely outcome would be lifting the back end of Windchill. But the spike can lift a
moving dolly, as you can see in the photo to the right.
The goal is to give Danny the option to lower the spike all the way to the floor for use as a wedge,
or raise it level to use it as a rammer. Although the mechanics are strong enough to lift the other
bot, the more likely outcome would be lifting the back end of Windchill. But the spike can lift a
moving dolly, as you can see in the photo to the right.

 (February 2, 2001)
We had major success this weekend, we got the motors mounted, the wheels attached, and borrowing
an RDFR33 from FrostBite, Dan was able to drive test Windchill (albeit without the spike).
If you click on the image to the right, you can see video of Windchill.
(February 2, 2001)
We had major success this weekend, we got the motors mounted, the wheels attached, and borrowing
an RDFR33 from FrostBite, Dan was able to drive test Windchill (albeit without the spike).
If you click on the image to the right, you can see video of Windchill.
 Looking at Dan's original drawing,
you can see that Dan originally planned on a wedge with spikes on top, but he fell in love with the
Bosch bull point spike, and when we found a 27 ft-lb servo in our parts box, he decided to
make a single, moveable spike the primary weapon.
Looking at Dan's original drawing,
you can see that Dan originally planned on a wedge with spikes on top, but he fell in love with the
Bosch bull point spike, and when we found a 27 ft-lb servo in our parts box, he decided to
make a single, moveable spike the primary weapon.

 Windchill started life as a POP (a "Pile of Parts"), which has become a newly accepted acronym
on the forum. We used Corel Draw 10 to do the design drawings for the body.
Windchill started life as a POP (a "Pile of Parts"), which has become a newly accepted acronym
on the forum. We used Corel Draw 10 to do the design drawings for the body.
Features:
We were (and still are) considering DeWalt 24V hammerdrill motors for powering Kelsey and Danny's middleweights, but we needed to get the body design to the fab shop this week, so we went with parts on hand for this iteration of Windchill.
Back to TeamToad BattleBots Home Page