Team Toad: Avalanche 2
Home |
News |
Team |
Robots > Avalanche > Avalanche 2 |
Events |
Research |
Stickers |
Video |
Links |
Contact


After getting skunked at Combots Cup 2009, we realized that articulating the plow blade from
the middle of the robot looked great, but with the arms over 18 inches long, the weapon was too weak
to defend against horizontal spinners.
During the design process, while trying to fit a half-ton linear actuator into the body, I had a crazy idea
to to double up the tires (just like Ice Cube and
Iceberg).
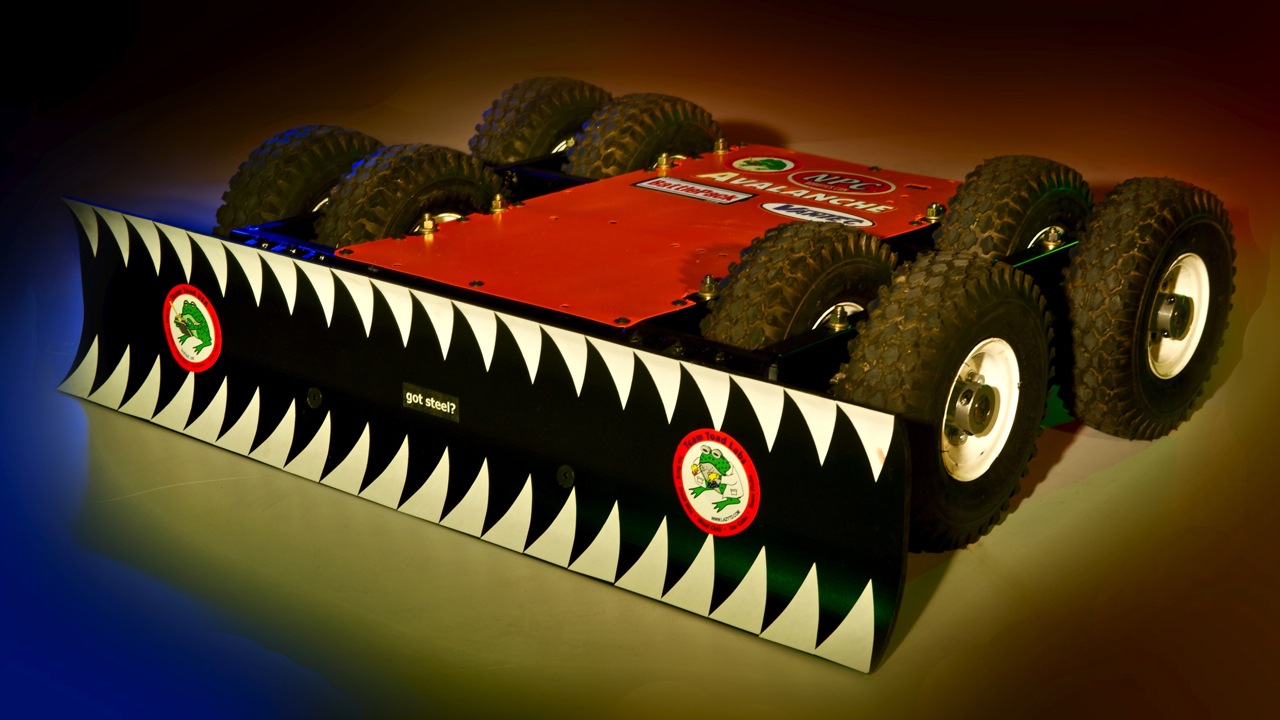
Eventually, we had to choose between eight wheels and having an actuated plow blade. So in the interest
of being completely extreme, I put eight 10" NPC rubber tires on a heavyweight. It pushed really
well, but an error in the chain-drive design allowed the axle bearings to shift as a result of box
rushes or strong hits. When the bearings shifted the chains ran off the sprockets.
Oops. That meant that I lost 1/4 of the drive in a close match over DXTer, and two wheels on the
same side against The Great Pumpkin.
Saturday night I took the whole robot apart and welded the bearing mounts in place. Things worked great
during the third fight (a knockout over Pummel Bug), but in the fourth fight one of the drive sprockets
broke toward the end of the fight.
In the end, the design was great at pushing, but whenever I locked up with an opponent they would
just back away faster than Avalanche could go.
Specifications
- Four 36V NiCad BattlePacks
- Two NPC T74 drive motors
- One-stage bowtie chain reduction driving eight 10" NPC tires
- 40" AR400 steel plow blade (the last one left from our BattleBots builds
- Vantec RDFR 47e speed control
Match History
- Win over DXTer
- Loss to The Great Pumpkin
- Win over Pummel Bug
- Loss to Vise Crypt
Home |
News |
Team |
Robots |
Events |
Research |
Stickers |
Video |
Links |
Contact