

FrostBite 4.0 is the fourth version of Team Toad's flagship heavyweight robot. FrostBite made its first appearance at Las Vegas in November 2000, and is currently seeded #14 in the BattleBot heavyweight class.

 (16-May-2002)
Okay, the bots shipped Monday, and FrostBite was the last bot completed. With the
new chain drive, the weapon turns at 3,600 rpm, up from 3,300 rpm last event.
We have two threshers made up. The one mounted on the bot has only 8 teeth,
saving about 4.5 pounds. We didn't want to be close on weight, since we still have
to attach a steel bar for back armor. The other thresher has 9 teeth, and we'll use that
if we have the weight.
(16-May-2002)
Okay, the bots shipped Monday, and FrostBite was the last bot completed. With the
new chain drive, the weapon turns at 3,600 rpm, up from 3,300 rpm last event.
We have two threshers made up. The one mounted on the bot has only 8 teeth,
saving about 4.5 pounds. We didn't want to be close on weight, since we still have
to attach a steel bar for back armor. The other thresher has 9 teeth, and we'll use that
if we have the weight.
The photo on the left shows the tent we had to put over the crates, because we had to load in the rain. IceBerg is already packed in the leftmost crate, and FrostBite went into the bottom shelf on the middle crate. At the top, you can see the last crate being put on the truck. Whew!
 (8-May-2002)
Work proceeds slowly but surely...last night we completed the mounting of the drive motors, gearheads,
and #35 roller chainand sprockets. The current draw at 18 volts is under 10 amps per side.
(8-May-2002)
Work proceeds slowly but surely...last night we completed the mounting of the drive motors, gearheads,
and #35 roller chainand sprockets. The current draw at 18 volts is under 10 amps per side.
Although the plan is to use the travel limit on the radio to keep the Vantec at or below 24 volts, we briefly ran the drive at 38 volts (the full voltage of the 30 cell BattlePacks), and boy does it scream.
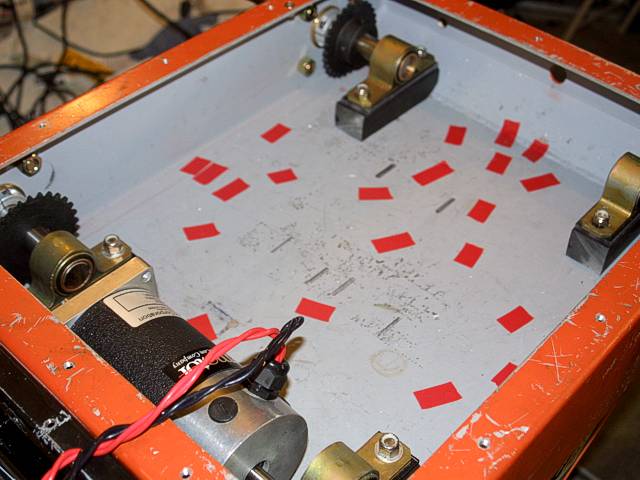 One of the things that happens when you change everything but keep the body is that you
get lots of holes you can't use...here we're getting set to drill and countersink the holes for the
Inertia-Labs motor mounts, but to make
sure I don't countersink the wrong hole, I covered all the unused holes with red tape.
One of the things that happens when you change everything but keep the body is that you
get lots of holes you can't use...here we're getting set to drill and countersink the holes for the
Inertia-Labs motor mounts, but to make
sure I don't countersink the wrong hole, I covered all the unused holes with red tape.
It would be cute to say that I couldn't use any of the hole again, but in fact there was exactly one (1) hole that was in the right place to mount the left gearhead bracket.
Tomorrow we wire up the Vantecs (they'll fit in the space between the two motors...barely.

 (6-May-2002)
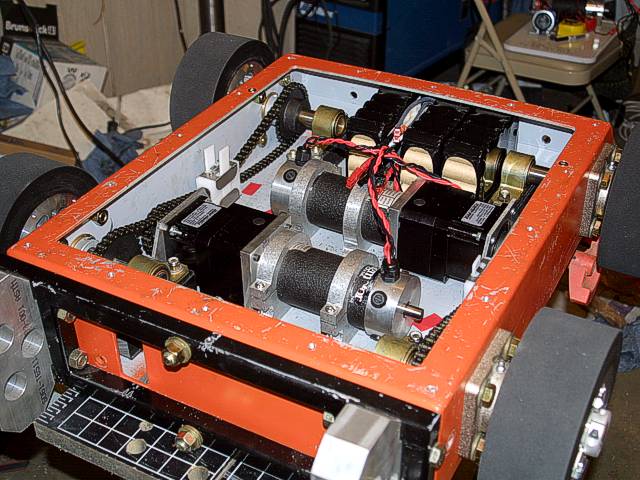
With the three smaller robots ready for battle, it was time to turn to the big boys...and since
FrostBite has the least work, we spent the afternoon getting the new 7-1 planetary gearheads attached
to the 3" MagMotors, and testing the new chain drive for the thresher.
(6-May-2002)
With the three smaller robots ready for battle, it was time to turn to the big boys...and since
FrostBite has the least work, we spent the afternoon getting the new 7-1 planetary gearheads attached
to the 3" MagMotors, and testing the new chain drive for the thresher.
Although the V-Belt drive for the thresher worked just fine, it required an adjustable motor mount for the 4" MagMotor. With the new drivetrain, we had to move the weapon motor forward two inches, and that left no room for the belt adjustment.
The proposed solution was a change to a #35 ANSI roller chain drive, along with a Dalton torque limited to prevent shocks from impacts from being transferred back to the motor.
The next two days we fit the chains for the drive wheels, and mount the drive motors. We're cutting it close, but at least we'll have a day or two to drive it before it has to go in the crate.
This May at Season 5.0 will be the first time we've reused the body from FrostBite...and we're keeping the same weapon, the dreaded 55 pound thresher:
But very little inside will be the same. The drivetrain parts list looks like a Who's Who of robot builders:
In order to make weight with such a heavy weapon, last time we switched from 4 direct drive NPC gearmotors to 2 NPC gearmotors driving 2 wheels directly and two chained to sprockets with bicycle chain. Unfortunately, the result was too slow (6.3 mph) and too fragile (the back wheels were both bent by an impact to the front of the robot).
This time we still wanted 4 wheel drive, but we switched from 1/2" axles to 1" axles. Instead of an external bicycle chain, we moved the chain inside and upped it to #35 ANSI roller chain.
The 3" MagMotors turn at 4,900 rpm (at 24 volts), and the Thomson Micron NemaTRUE Plus 7-1 gearhead drops that to 700 rpm. The chain drive uses a 19 tooth pinion and a 28 tooth gear sprocket, giving another 1.47 reduction, or an rpm of 475. With the 3" wide 8" tire turned down to 7.5" to match the diameter of the old Kubota wheels, that gives us a top speed of 10.6 mph.
The axles are mounted over-hung using a self-aligning ball bearing bolted to the robot body, and the other end turns in a bronze bushing mounted on a rubber cushion to abosrb impact.
The task for the weekend is to decide the final placement of the motors and bolt everything to the floor. There's not a lot of room inside for the new drivetrain, but last time we left space for a slam-cam. That wound up giving us enough room to move the chains inside this time. But there won't be room for a slam-cam anymore.