

This page describes Iceberg, Team Toad's Super-Heavyweight.
 (8-Aug-2001)
Now that someone else has revealed that the Judge beat IceBerg in the first round
of preliminaries at Treasure Island, we can post these
post-fight photos.
(8-Aug-2001)
Now that someone else has revealed that the Judge beat IceBerg in the first round
of preliminaries at Treasure Island, we can post these
post-fight photos.
To prepare for the fight, we decided to drop out 2 battery packs (using 8 instead of 10 strings of NiMHs), allowing us to put the heavy 1/8" steel top on IceBerg. Our base configuration was 10 strings of batteries and a 3/16" aluminum top. We also made a protective cover of spring steel and vinyl placemats sandwiched together that we put over the Vantecs, receiver and power busses.
When the fight started, it was apparent that IceBerg was slower the Judge, but with tank steering instead of the Judge's car steering, IceBerg was able to get around to the corners and sides of the Judge. I even managed to get IceBerg's pneumatic blade up under the right front corner of the Judge and lifted his front wheels off the ground, but without any saws or pulverizers to help, IceBerg couldn't do much more than push the Judge around from the side. I tried to maneuver behind the Judge to push him from a safe angle, but that was a mistake, because the Judge being faster just drove away and turned for another pass.
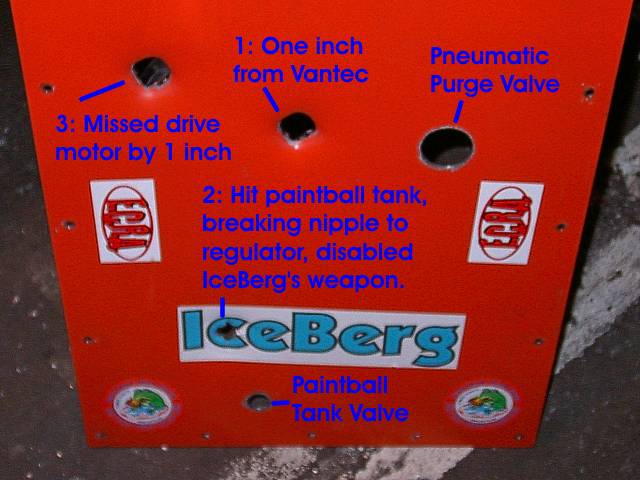
 I had managed to avoid the Judge's hammer for the better part of a minute, but on
the next pass, the hammer came down squarely in the middle of the lid, penetrating
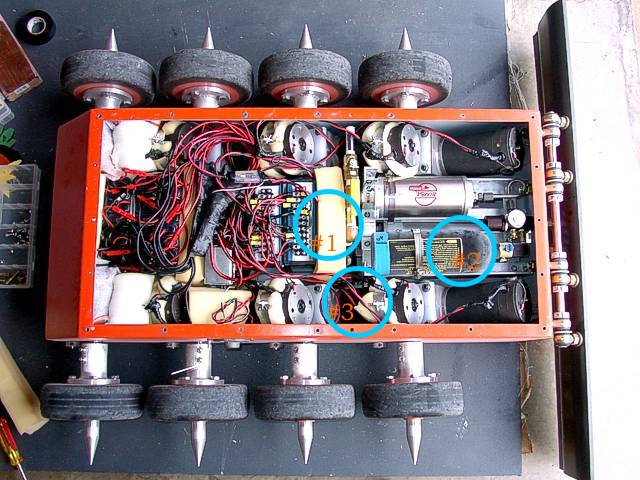
several inches into the guts of the robot. As you can see from the
photo to the left, he hit a piece of foam rubber, missing the Vantec 47 and
the pneumatic solenoid valve by about an inch.
I had managed to avoid the Judge's hammer for the better part of a minute, but on
the next pass, the hammer came down squarely in the middle of the lid, penetrating
several inches into the guts of the robot. As you can see from the
photo to the left, he hit a piece of foam rubber, missing the Vantec 47 and
the pneumatic solenoid valve by about an inch.
Unphased at this point, I got IceBerg around to the side once more, and pushed the Judge from the side again, but again he drove away. His second pass resulted in another hole, this time hitting only air: compressed air in the form of my paintball tank. The force of the blow dented but did not puncture the tank, but it did break the tank off the regulator, disabling IceBerg's pneumatic plow blade.
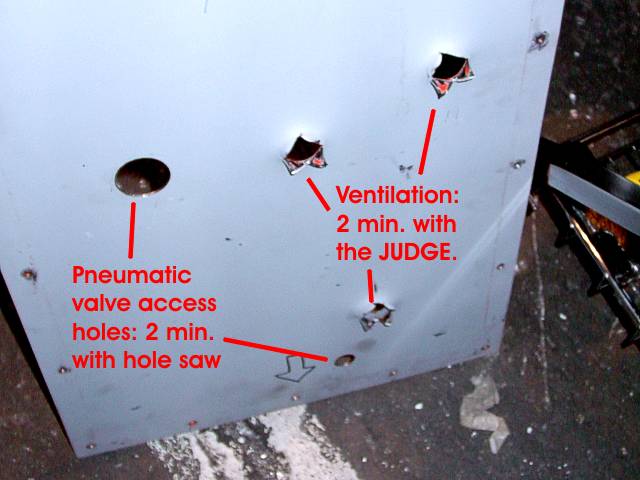
Still moving, I got IceBerg around to the side one more time, but without the plow blade to lift the Judge off the ground, I couldn't manhandle him anymore, and he was abled to get to the side of IceBerg and land one more blow, this time hitting between two NPC motors. The fight ended with the two robots stuck together, and the Judge won a well earned decision on damage points. The best I can say is that unlike his next two opponents, we weren't knocked out. Also, the Judge put 4 holes in the floor, but only 3 in IceBerg. The extra armor over the Vantecs never got a chance to prove itself, but I doubt it would have been enough.
I would have preferred to have fought with the hazards on...the Judge had a huge turning circle, so I might have been able to drive between the hazards better and win with Pete's help, but with a lightly armored top, I was just waiting to be found "guilty". This was one of the first clues that the new crop of robots was far tougher than the bots in Vegas: 1/8" steel used to be a lot of armor, but now it's light armor. Also, the bad news is that Jascha is dumping the car steering and going with tank steering for the next event. Bummer.
 After the fight, we gave the newly perforated lid and dented paintball tank to the
Judge team as trophies. They were proudly display on their pit table for the whole
event (you can just see the lid in the picture to the right, behind the hammer arm).
There was lots of room on their pit table for trophies, because the Judge
itself was too huge to fit on the table, so it lived on a cart in the aisle.
After the fight, we gave the newly perforated lid and dented paintball tank to the
Judge team as trophies. They were proudly display on their pit table for the whole
event (you can just see the lid in the picture to the right, behind the hammer arm).
There was lots of room on their pit table for trophies, because the Judge
itself was too huge to fit on the table, so it lived on a cart in the aisle.
I was very happy with IceBerg's pushing power and lifting weapon, so we'll be bringing IceBerg back for another chance. But we'll work on the self-righting and heavier top armor.
Here are the stats on IceBerg:
 (15-May-2001)
Okay, last night I noticed that IceBerg's left front wheel was cockeyed compared to the
other 3 on that side. Even though the ECRA truck was coming in 10 hours, I had to know
why, so I pulled the pneumatics and figured out a way to remove the front motors without
removing the 3 sitting on top of it.
(15-May-2001)
Okay, last night I noticed that IceBerg's left front wheel was cockeyed compared to the
other 3 on that side. Even though the ECRA truck was coming in 10 hours, I had to know
why, so I pulled the pneumatics and figured out a way to remove the front motors without
removing the 3 sitting on top of it.
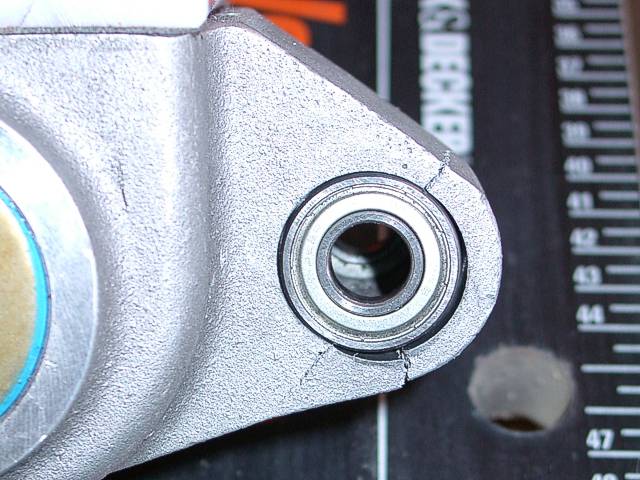
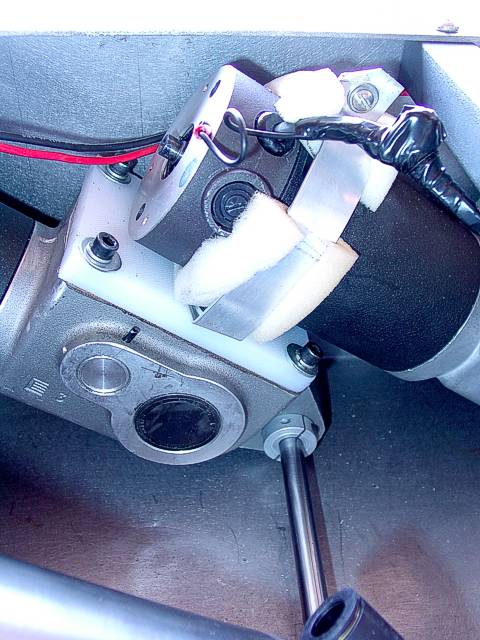
 As you can see, the stress of self-righting and firing the snowplow had broken the gear
box bearing mount. I grabbed one of my many spares and replaced the motor. I also
adding some leg supports under the front so that when the snowplow fires, the stress is
taken by the legs instead of the wheels.
As you can see, the stress of self-righting and firing the snowplow had broken the gear
box bearing mount. I grabbed one of my many spares and replaced the motor. I also
adding some leg supports under the front so that when the snowplow fires, the stress is
taken by the legs instead of the wheels.
Glad I found this one before we got to the arena.
Once we got the pneumatics replaced and the blade height adjusted, Debbie started on the wheel preparation by grinding the ridges off the tread on the tires. We'll add the oil of wintergreen in the pits.
Here you can see me using my other pusher to help load the crates on the truck:

What a relief...I can sleep for a few days. We ran out of room in the crates, so I'll still have some handtools, extension cords, and stuff in my luggage, but we got 5 working robots and all the batteries, CO2 tanks, spare motors, chargers, and spare Vantecs already on their way to San Francisco.


 (11-May-2001) Okay, Dan and I got the electrically powered linear actuator-driven
self-righting mechanism built and tested. We replaced the 3/16" aluminum top with a
1/8" aluminum top. We built a frame out of 1" square steel perf tube, driven by
a Motions Systems 6" stroke linear actuator.
(11-May-2001) Okay, Dan and I got the electrically powered linear actuator-driven
self-righting mechanism built and tested. We replaced the 3/16" aluminum top with a
1/8" aluminum top. We built a frame out of 1" square steel perf tube, driven by
a Motions Systems 6" stroke linear actuator.



Here's a sequence of stills from the video:




click to view video
So at last, on the third try, Iceberg can un-turtle itself. We'll have to take our some of the batteries to fit the extra weight in, so we'll only use this modular top against bots we think have a good chance of flipping us over.

 (4-May-2001) IceBerg is painted, assembled, and passed the radio range test, this morning.
This afternoon, we wired up a Team Delta eSwitch to control the pneumatic valve.
The photo to the left shows how everything fits together. Click on the right to see
an AVI video of the weapon firing.
(4-May-2001) IceBerg is painted, assembled, and passed the radio range test, this morning.
This afternoon, we wired up a Team Delta eSwitch to control the pneumatic valve.
The photo to the left shows how everything fits together. Click on the right to see
an AVI video of the weapon firing.
The blade reaches full extension in about a tenth of a second, with over 700 lbs of force. Here's a still from the video of IceBerg playing with a ten pound robot chew toy:
Next we build the modular, electrically actuated self-righting arm.
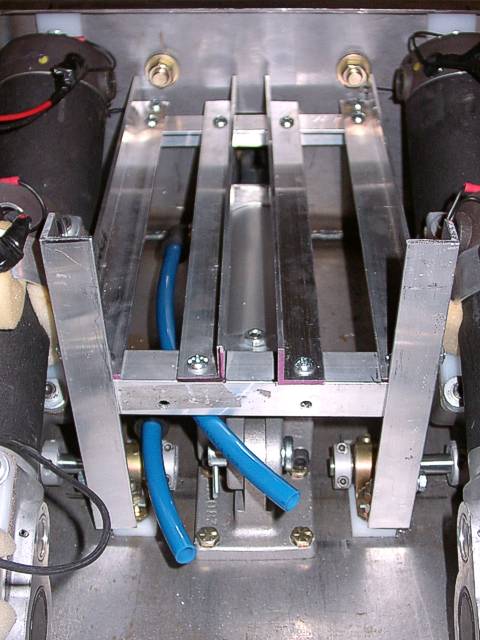
 (27-Apr-2001) Today we made major progress in mounting the pneumatic tanks for IceBerg.
The photo on the left shows a framework of 1/8" x 1" aluminum angle. The photo on the
right shows the tanks each riding between a pair of angle bars, with the 1/2" solenoid-pilot
valve in front. Since we're using 20 oz anti-siphon CO2 tanks, we've labelled them
so we know which way is up. The yellow handle is our purge valve.
(27-Apr-2001) Today we made major progress in mounting the pneumatic tanks for IceBerg.
The photo on the left shows a framework of 1/8" x 1" aluminum angle. The photo on the
right shows the tanks each riding between a pair of angle bars, with the 1/2" solenoid-pilot
valve in front. Since we're using 20 oz anti-siphon CO2 tanks, we've labelled them
so we know which way is up. The yellow handle is our purge valve.
 This photo shows the pneumatics from the front, and provides a closeup of the blade mount.
The 1/4" steel plow blade pivots on 4 pairs of neoprene isolated grade 8 steel eye bolts.
Getting the four pairs lined up well enough to thread the 1/2" steel rod through them
was quite a feat for a software guy.
This photo shows the pneumatics from the front, and provides a closeup of the blade mount.
The 1/4" steel plow blade pivots on 4 pairs of neoprene isolated grade 8 steel eye bolts.
Getting the four pairs lined up well enough to thread the 1/2" steel rod through them
was quite a feat for a software guy.
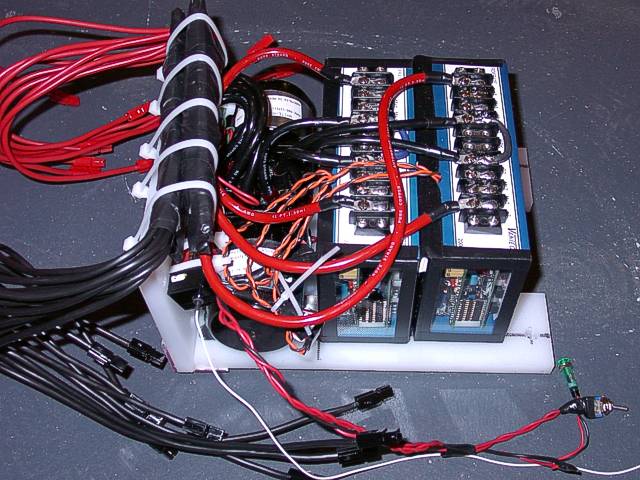
 (17-Apr-2001)
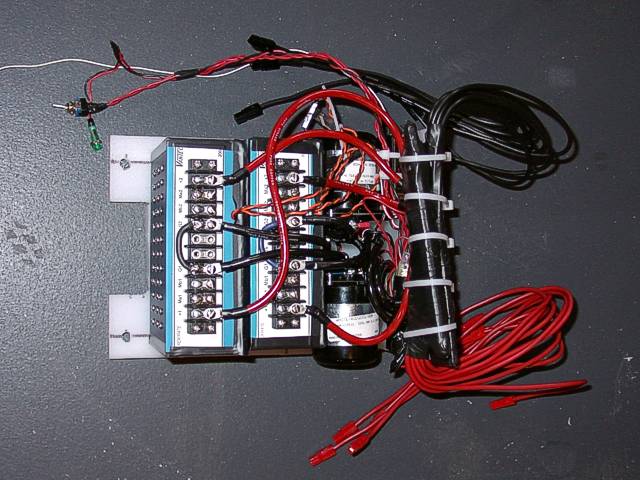
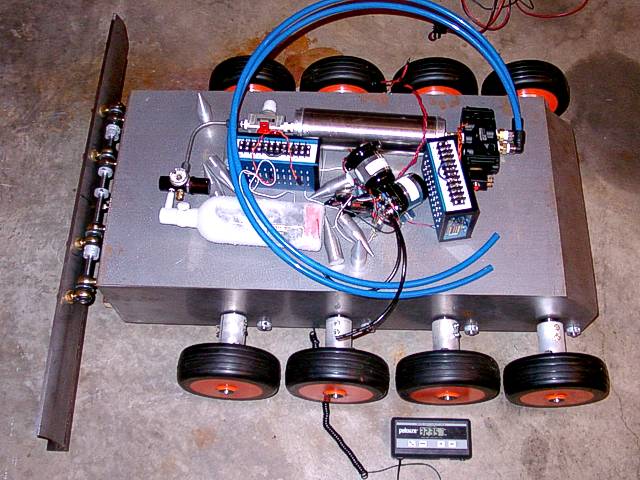
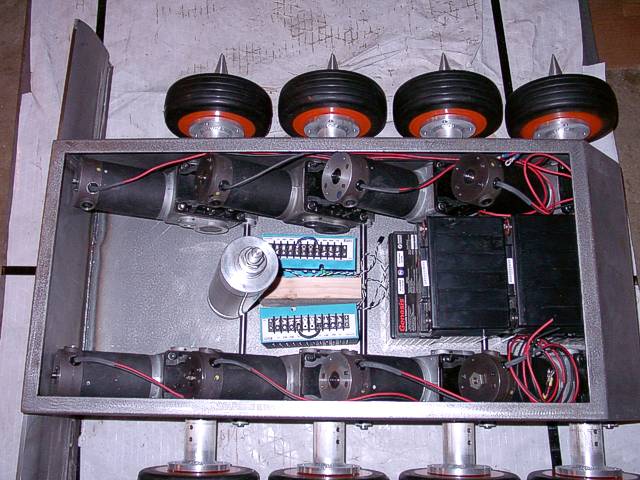
It's alive! We've spent half of last week and two days this week getting
the electrical system for IceBerg wired up. You can see photos on the left.
Using a 1/2" HDPE substrate (a cutting board from Ames), we mounted the
two White-Rodgers 36V 200A continuous solenoids, a Team Delta RCE200 e-switch,
a Futaba Rx, and two Vantec RDFR47e's.
(17-Apr-2001)
It's alive! We've spent half of last week and two days this week getting
the electrical system for IceBerg wired up. You can see photos on the left.
Using a 1/2" HDPE substrate (a cutting board from Ames), we mounted the
two White-Rodgers 36V 200A continuous solenoids, a Team Delta RCE200 e-switch,
a Futaba Rx, and two Vantec RDFR47e's.
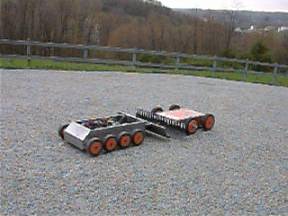 To the right, you can see videos of IceBerg's first driving test. Below that,
we used our favorite self-propelled test weight (the old FrostBite) being used
to test pushing. We only had 3 strings of batteries in IceBerg for this test.
Once we get more battery packs built, we'll have IceBerg at its full power.
To the right, you can see videos of IceBerg's first driving test. Below that,
we used our favorite self-propelled test weight (the old FrostBite) being used
to test pushing. We only had 3 strings of batteries in IceBerg for this test.
Once we get more battery packs built, we'll have IceBerg at its full power.
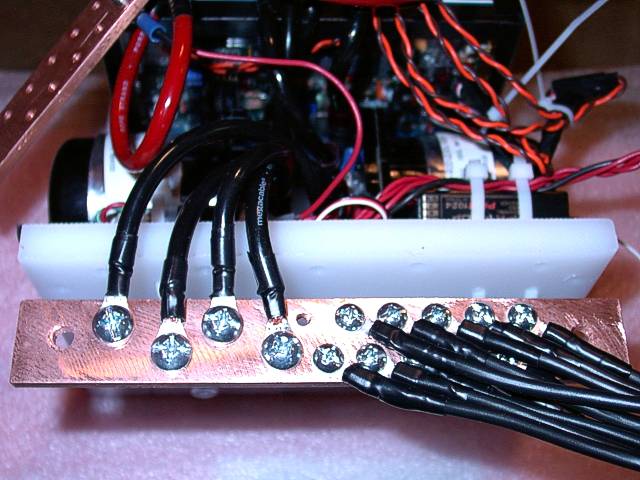 To route that power, we used a pair of 10 gauge wires for each battery pack to a homemade 1/4" copper
buss bar. Then we ran 8 gauge wires from the buss bar to the DC power solenoids. Each
Vantec gets its own relay. Team Toad was invited to a 12 lb robot fight earlier this year.
I said we couldn't, because our smallest motor was 13 pounds. It turns out the electronics
for IceBerg also weigh 13 pounds!
To route that power, we used a pair of 10 gauge wires for each battery pack to a homemade 1/4" copper
buss bar. Then we ran 8 gauge wires from the buss bar to the DC power solenoids. Each
Vantec gets its own relay. Team Toad was invited to a 12 lb robot fight earlier this year.
I said we couldn't, because our smallest motor was 13 pounds. It turns out the electronics
for IceBerg also weigh 13 pounds!


 (16-Apr-2001)
We mounted the pneumatic snowplow blade this week, along with the pneumatic cylinder
that powers it. JPEG AVI videos of the tests are available to the right.
(16-Apr-2001)
We mounted the pneumatic snowplow blade this week, along with the pneumatic cylinder
that powers it. JPEG AVI videos of the tests are available to the right.
It's no Toro, but as you can see from the video still on the right, it can put 210 pounds of robot a couple of feet in the air. I was busy testing it on 2x4's and exercise weights, and Debbie said "I want to throw something heavier. Too bad we can't use FrostBite." I said, "Perfect, we're using FrostBite 1.0 for adversary testing, anyway!"
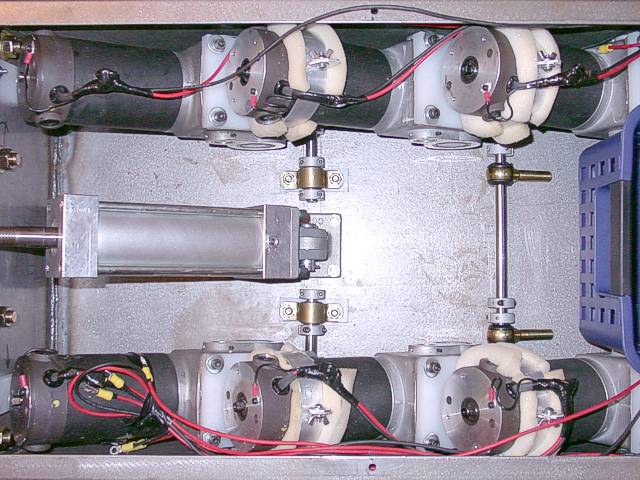
 We had to kluge the cylinder mount, because it needed to be mounted right in the
middle of the robot where the first motor mount shaft was already in place. So the photo on
the left shows how we cut 4 inches out and mounted two more bearings.
We had to kluge the cylinder mount, because it needed to be mounted right in the
middle of the robot where the first motor mount shaft was already in place. So the photo on
the left shows how we cut 4 inches out and mounted two more bearings.
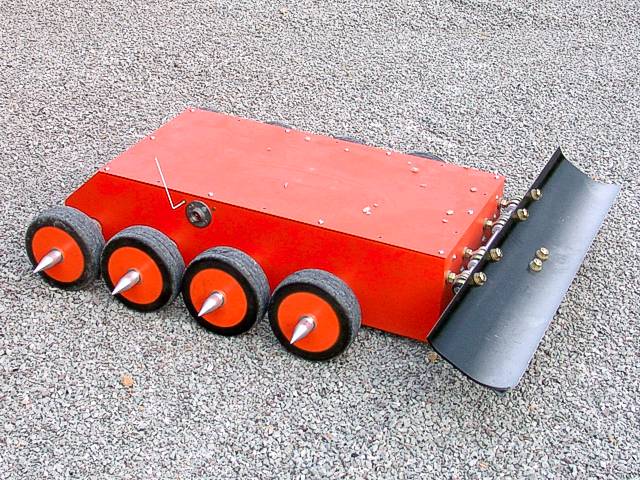
As you can see in the photo on the right, we are right at our weight limit, 323.5 lbs plus 20 oz of CO2, puts us almost exactly at 325 lbs. We'll have to buy some lighteight paint.
 (13-Apr-2001) Well, we've given up on self-righting, and decided to focus on the snowplow blade,
instead. We got a bigger valve from McMaster (1/2" ports, 5.0 Cv), and tried
self-righting, again. IceBerg got about 1 foot in the air, but still didn't
flip over.
(13-Apr-2001) Well, we've given up on self-righting, and decided to focus on the snowplow blade,
instead. We got a bigger valve from McMaster (1/2" ports, 5.0 Cv), and tried
self-righting, again. IceBerg got about 1 foot in the air, but still didn't
flip over.
Here are some stills from the videos:


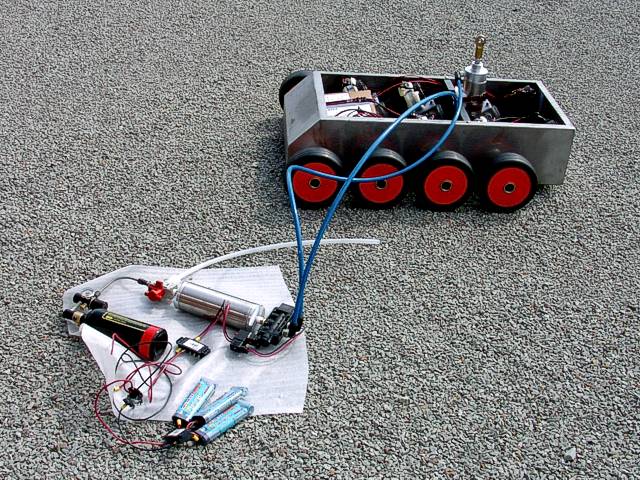
(08-Apr-2001) Well it was a busy weekend. We shock mounted the motors and the War Machine surplus cylinder, and hooked up the pneumatics via a couple of long hoses. We figured there was no point in figuring out how to mount the pneumatics if they weren't strong enough. We didn't mount the blade, but we did put 33 NiMH battery packs in a cardboard box strapped into the approximate location they'd be mounted.
The results were disappointing...Debbie pushed the button and IceBerg quickly raised itself exactly 6 inches higher. But not nearly fast enough to achieve escape velocity. We have MPEG video of the failed self-righting test (1.4 mb).
Since there are now two months left until San Francisco, we've decided to bag the self-righting and use the pneumatics to power the snowplow blade only. We see it this way...although flipping back up penumatically is a great crowd pleaser, we'd rather use an aggressive weapon to knock the other robot back, and hope the crowd is satistfied with that.
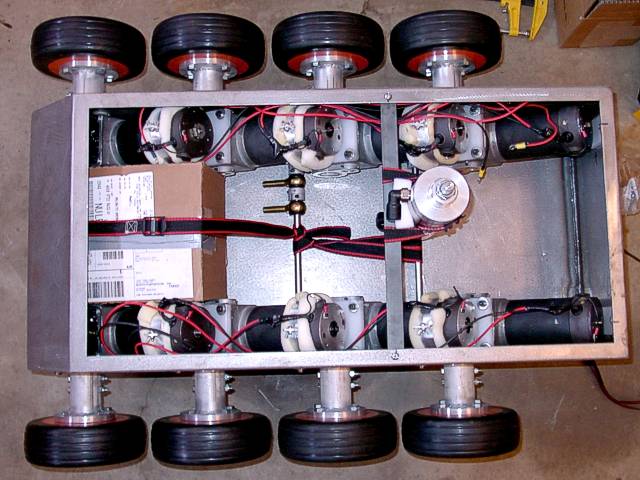
 The photo to the left shows a closeup of our motor mounting scheme for the
NPC 60522 motors: we stack em
four on each side. We use 1/2" steel shafts through the main gearbox bearings to carry the
load, and we attach the motor end to the top of the gearbox of the previous motor in line.
The photo to the left shows a closeup of our motor mounting scheme for the
NPC 60522 motors: we stack em
four on each side. We use 1/2" steel shafts through the main gearbox bearings to carry the
load, and we attach the motor end to the top of the gearbox of the previous motor in line.
For the first three rows, we replace the gearbox covers with UHMW Polyethylene (cutting boards from Ace kitchen department, $9 each). On top of that we made motor straps from 1" by 1/16" aluminum and foam rubber to hold the next motor in the line.
For the last motor, we don't need to protect the gearbox, so for fun we used 0.100 high impact acrylic to cover the motors. It's lighter, and as a neat side-effect, you can see the gears turning.
 March has been busy, so we've have few builder updates, but we're now in the home stretch, so we'll be building and reporting more over the next 2 months.
March has been busy, so we've have few builder updates, but we're now in the home stretch, so we'll be building and reporting more over the next 2 months.
We got our Tower Hobbies shipment today, so IceBerg should have plenty of motive power.

 Over the last three weeks, we've acquire a complete CO2 based pneumatic toolkit, including paintball cylinders with
on-off valves and anti-siphon tubes, Shocker regulators, a Bimbda reservoir for an expansion chamber, a safety
purge/lockout valve, and a host of fittings and hoses.
We also leased a 50 pound CO2 dip tank and bought a fill-station assembly so we can fill the tanks and
test at home.
Over the last three weeks, we've acquire a complete CO2 based pneumatic toolkit, including paintball cylinders with
on-off valves and anti-siphon tubes, Shocker regulators, a Bimbda reservoir for an expansion chamber, a safety
purge/lockout valve, and a host of fittings and hoses.
We also leased a 50 pound CO2 dip tank and bought a fill-station assembly so we can fill the tanks and
test at home.
And today we ordered 80 7-cell NiMH battery packs for IceBerg. We were going to use Hawker G16-EP's, but that would really only give us 6-7 AHs, and with 8 motors we figured we needed twice that. Since we didn't have the weight for more SLA's, we figure to use 8 28-cell strings of the Panasonics, giving us 16-17 AHs over 5 minute discharge.
 (Feb 22, 2000) We got our 8 NPC-60522 motors mounted today. We'll have to modify or replace the gearbox covers, since
they protrude just a little too much. Once ground down, the motors will all fit within the 8" tall
case.
(Feb 22, 2000) We got our 8 NPC-60522 motors mounted today. We'll have to modify or replace the gearbox covers, since
they protrude just a little too much. Once ground down, the motors will all fit within the 8" tall
case.
I hit on a great safety innovation today. I've been using my drill press to turn 1/2" steel shafts and emory cloth to take a couple of thousandths of an inch off so they'd fit through the 1/2" bearings on the motors. Finally, it occurred to me that it would be easier to use my Dremel to grind out the bearings. There's a lot less metal to remove, and no chance of having another steel rod vibrate loose and hit me in the mouth, again.
 As designed, IceBerg is the only Team Toad robot that can't drive upside-down. Given the success of
Toro in Las Vegas, we've given
serious thought to making IceBerg able to self-right. Our first plan is to use
Vlad the Impaler's
method: a single pneumatic cylinder firing straight up (or down). We got 4 pneumatic cylinders
from Team Delta (they're War Machine Surplus), and ordered a bunch of aluminum paintball
tanks and regulators from a local paintball pro.
As designed, IceBerg is the only Team Toad robot that can't drive upside-down. Given the success of
Toro in Las Vegas, we've given
serious thought to making IceBerg able to self-right. Our first plan is to use
Vlad the Impaler's
method: a single pneumatic cylinder firing straight up (or down). We got 4 pneumatic cylinders
from Team Delta (they're War Machine Surplus), and ordered a bunch of aluminum paintball
tanks and regulators from a local paintball pro.
Depending on weight, we're also considering having the snowplow pivot upwards under pneumatic power. We doubt that we'll be able to flip our opponent upside-down, but it might gives us a better chance to get far enough under him to win a pushing fight.
{kind=link}