
 (15-Sep-2003)
We got everything ready well in advance for the
Triangle Series Nationals,
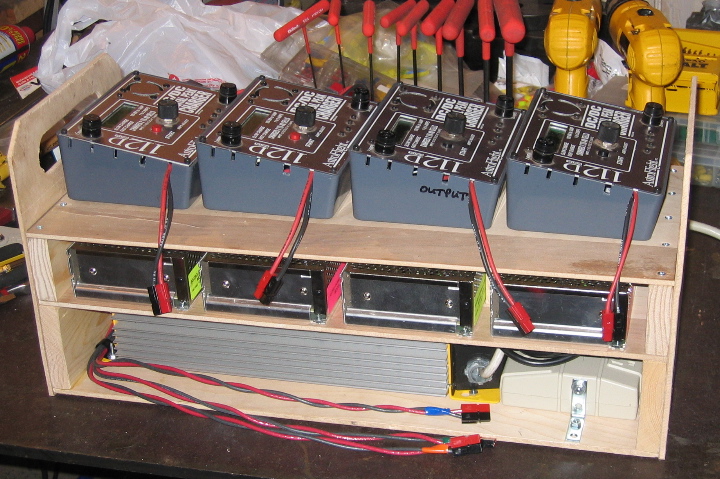
and even had time to organize our battery chargers. This stand can charge 3 Hawkers and 4 Nicad
or NiMH packs at the same time.
(15-Sep-2003)
We got everything ready well in advance for the
Triangle Series Nationals,
and even had time to organize our battery chargers. This stand can charge 3 Hawkers and 4 Nicad
or NiMH packs at the same time.
Lionheart was the first Team Toad robot to have a charging jack instead of swapping the batteries each fight. This is a huge time saver at events, and will be a feature on all our robots, soon.
 (9-Sep-2003)
Lionheart had a very successful career at the Robot Club & Grille,
taking two first places and two seconds in four outings, becoming the
number one ranked MW at RC&G. Now Lionheart is headed for the
Triangle Series Nationals.
(9-Sep-2003)
Lionheart had a very successful career at the Robot Club & Grille,
taking two first places and two seconds in four outings, becoming the
number one ranked MW at RC&G. Now Lionheart is headed for the
Triangle Series Nationals.
To prepare for the nationals, Lionheart was stripped down to its component parts, including disassembling the Whyachi gearboxes and replacing the ball bearings. We purchased four brand-new Hawker Genesis batteries, because battery failure was the cause of Lionheart's last loss.
Finally, we made a wooden cover for the razor-sharp nose, to replace the cheesy piece of rubber hose and duct-tape we were using.
(22-Dec-2002) Danny struck paydirt in his second outting with Lionheart at the Robot Club & Grille Grand Opening on December 7, 2002, taking the first place trophy in the Middleweight division.
In his first tournament in October, he went 1-2 with Lionheart. He was one of many victims of the dreaded "bumper-gap", getting stuck while fighting Man-O-War.
As you can see from the photo above, we added small steel tabs to the knife-edged wedge to prevent a repeat. The modification worked great. In December, Danny had these fights:


Lionheart is inspired by a weapon from the Final Fantasy video game: the gun blade.
Since guns are prohibited in BattleBots, Danny has to settle for using the blade. It will
form the tail of the bot.
 This page describes Lionheart, Danny's new middleweight.
His last middleweight, WindChill had only one win in
two tournaments, mainly because the gearmotor output shafts were simply too small (7/16").
This page describes Lionheart, Danny's new middleweight.
His last middleweight, WindChill had only one win in
two tournaments, mainly because the gearmotor output shafts were simply too small (7/16").


 (3-Aug-2002)
We had the first drive test of Lionheart yesterday.
To the left you can see Danny's Peter Abrahamson impersonation as
he stands in the unfinished 16'x16' arena at the
Lazy Toad Robot Club.
(3-Aug-2002)
We had the first drive test of Lionheart yesterday.
To the left you can see Danny's Peter Abrahamson impersonation as
he stands in the unfinished 16'x16' arena at the
Lazy Toad Robot Club.
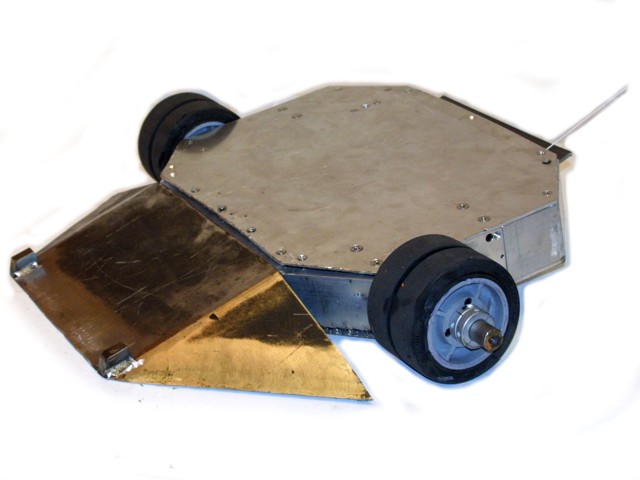
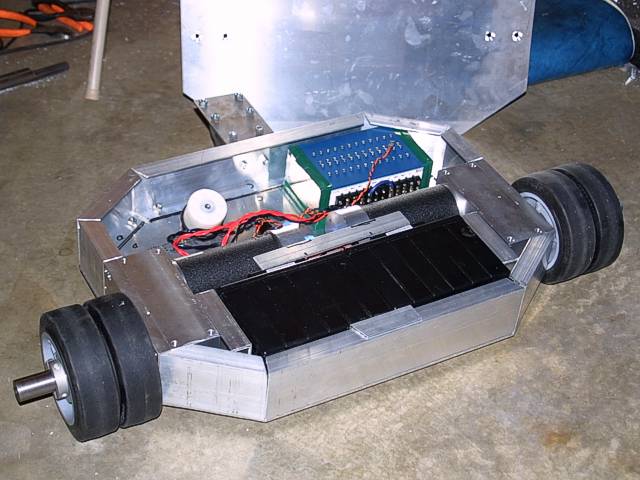
To the right you see the drive module from Lionheart. Without the wedge and blade, it's about 80 pounds, so there's lots of weight left over for weapons. The back is held up by a temporary caster...once we make the 25 pound steel front wedge, the nose will be heavy enough to keep the back in the air.
The drive test showed that Lionheart is very fast, and will be hard to control. But it rotates rapidly, which is a good thing in a thwackbot.
While he was there, Danny couldn't resist the urge to scrounge a scrap piece of 1/2" Lexan left over from the arena construction.
 (1-Aug-2002)
Danny always starts his robots with models sculpted from scavanged pieces and lots of
electrical
and duct
tape, and Lionheart is no different. Here we see a radio-controlled "El Diablo" stripped down to
its chassis, and festooned with "Magic, the Gathering" cards for a wedge.
(1-Aug-2002)
Danny always starts his robots with models sculpted from scavanged pieces and lots of
electrical
and duct
tape, and Lionheart is no different. Here we see a radio-controlled "El Diablo" stripped down to
its chassis, and festooned with "Magic, the Gathering" cards for a wedge.
 Here we see Danny marking the bottom plate (3/16" 6061 aluminum). The Whyachi gearboxes mount with 4 5/16"
bolts on the top and 4 on the bottom (we're not using the side bolt holes).
Here we see Danny marking the bottom plate (3/16" 6061 aluminum). The Whyachi gearboxes mount with 4 5/16"
bolts on the top and 4 on the bottom (we're not using the side bolt holes).
 The robot itself is just 3-3/8" tall. The sides are made from 3" 6061 aluminum channel 1/8" thick.
For now we're bolting the pieces to the bottom plate...eventually we'll weld parts of it together.
The wheels are 6" Colson's from Team Delta, mounted on 1" keyed shafts and held on
with shaft collars.
The robot itself is just 3-3/8" tall. The sides are made from 3" 6061 aluminum channel 1/8" thick.
For now we're bolting the pieces to the bottom plate...eventually we'll weld parts of it together.
The wheels are 6" Colson's from Team Delta, mounted on 1" keyed shafts and held on
with shaft collars.
 To increase the speed, we went with two 3" magmotors with Team Whyachi 8-1 reduction gear
boxes. To the right you see the CAD drawing. He's still using
two Hawker Genesis batteries to provide 24 volts.
To increase the speed, we went with two 3" magmotors with Team Whyachi 8-1 reduction gear
boxes. To the right you see the CAD drawing. He's still using
two Hawker Genesis batteries to provide 24 volts.
We have to upgrade from a Vantec 33 to either a 36 or a 47, though.
 Here we see the week's work so far: just a simple matter of wiring and we'll be ready for a drive
test. Since the weight of the wedge is critical to balance, we spent part of this evening mounted
a caster on the back to hold the bot level for drive testing.
Here we see the week's work so far: just a simple matter of wiring and we'll be ready for a drive
test. Since the weight of the wedge is critical to balance, we spent part of this evening mounted
a caster on the back to hold the bot level for drive testing.
If we can get the bot wired tomorrow morning, we'll take it over to the Lazy Toad Robot Club for a test drive. We want to get the speed and controllability issues identified while Danny is still with us this summer.
In early Fall, we'll fab and mount the front wedge and rear blade, and hope to have the bot ready for the Season 6.0 of BattleBots.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}