

 (12-Sep-2002)
(12-Sep-2002)

 (5-May-2002)
We rewired IceCube today to account for the change from 4 NiMH packs to 2 Nicad Battlepacks,
and for the separate battery supply for the self-righting arm. The Seiko servo is a 12
volt servo, and we just can't risk running it at 36 volts. That meant two master switches,
an arming relay to keep the servo from twitching on power-up, and two indicator lights
to make sure we didn't forget to turn on both switches.
(5-May-2002)
We rewired IceCube today to account for the change from 4 NiMH packs to 2 Nicad Battlepacks,
and for the separate battery supply for the self-righting arm. The Seiko servo is a 12
volt servo, and we just can't risk running it at 36 volts. That meant two master switches,
an arming relay to keep the servo from twitching on power-up, and two indicator lights
to make sure we didn't forget to turn on both switches.
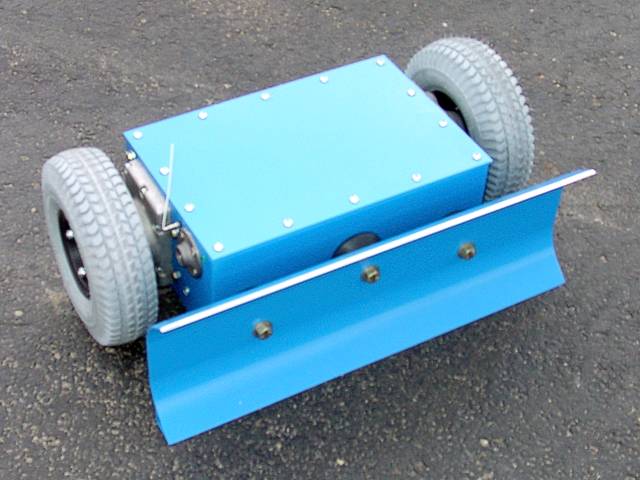
Here you see the final result, the new Ice Cube weighs in at 109.5 pounds. We'll probably add some ballast at the event...there's not enough room for a third BattlePack, and not enough time for any major changes.
Well, that's three robots ready for TI-3...two more to go.
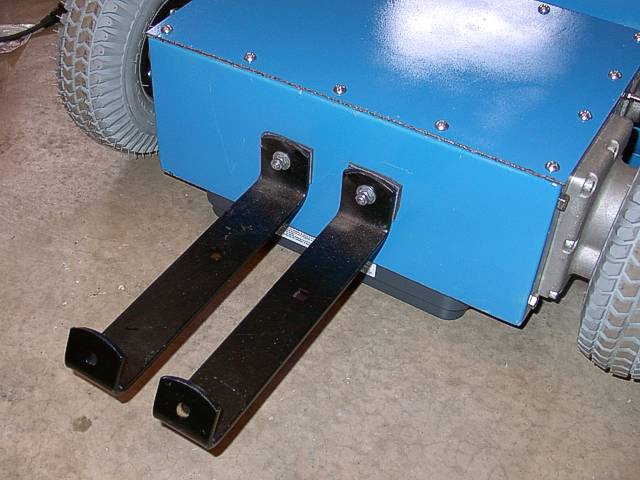
(29-Apr-2002) Ice Cube has had good performance at TI-1 and TI-2, winning 3 matches, including a KO of Internal Audit last November. But our match with Turtle Road Kill pointed out Ice Cube's main weakness: if it lands on its nose, it's very stable and unable to move. Not once, but twice in two minutes, Kelsey drove Ice Cube at ramming speed over the top of the Turtle and launched Ice Cube in an arc that landed it on its face.
So for May, we needed an add-on that would fit in the limited space of the little steel box, not affect the big wide steel blade, not get in the way of the wheels, not affect the ability to drive upside down, and of course, not put us overweight.
At the Lazy Toad Ranch, we have boxes and shelves of parts...not unused parts, just parts we havenm't figured out where to put, yet. We grabbed a Seiko high-powered servo from Vantec. They have several models, this one features +/- 90 degrees of travel.
We cut a 16" long piece of 0.750" square aluminum tube for the main arm, and two lever arms 1" wide out of 3/16" 6061 aluminum plate. One is straight, and the other has a dog legged shape to fit around the NPC 64038 motor case.



The first test was whether the 27 ft-lb servo would be strong enough to lift the robot off its face. Initial tests with half the wheels and no batteries or hoop were successful. Next we'll reassemble the robot so it's at its fighting weight of 120 pounds and try again. For the first test, the robot weighed about 85 pounds, and we ran the 12 volt servo at 15 volts.


We also found that the stiffer hoop spring we used at TI-2 had a tendency to cause Ice Cube to bounce up and down while driving...while the Bouncing Betty" effect was a crowd pleaser, it meant the the business end of our 15 pound steel blade was rarely on the ground when it needed to be. So we're going back to a lighter, less stiff hoop for TI-3.

Ice Cube is Team Crystal's new Middleweight, and is being built by Kelsey.
Here is her original design drawing 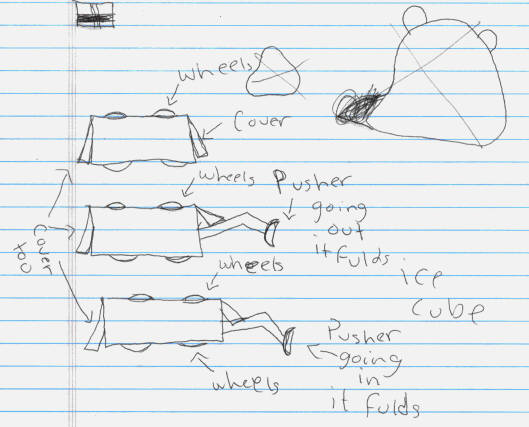 .
.
Kelsey's original goal was a pneumatic flipper, but at BBTI1 it featured an unpowered steel snowplow blade. It was such a success that we're not liekly to make many changes for the next event.

 (01-Jun-2001)
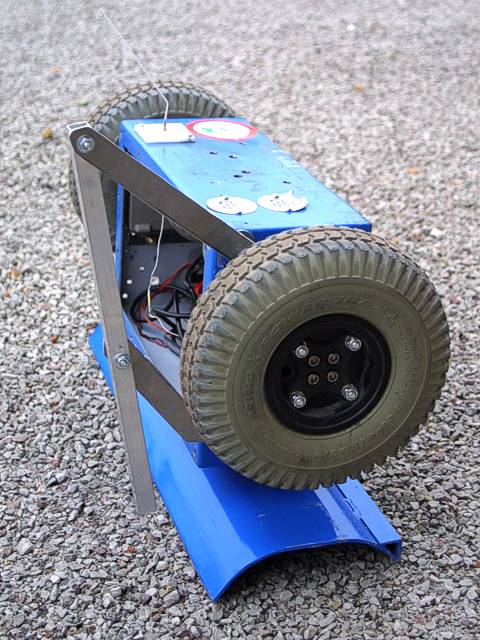
Okay, now that the event is over, we can finally reveal the secret weapon that IceCube used
to great success in San Francisco: a spring steel hoop wheelie bar, coupled with dual tires protected
by 7075 aluminum hubcaps. To the right, you can see the older version, without wheelie prevention.
(01-Jun-2001)
Okay, now that the event is over, we can finally reveal the secret weapon that IceCube used
to great success in San Francisco: a spring steel hoop wheelie bar, coupled with dual tires protected
by 7075 aluminum hubcaps. To the right, you can see the older version, without wheelie prevention.
The hoop provides a more constant downward force on the blade, and adds a crazy chewing action when IceCube gets under its opponent and starts pushing it into the spike strip.

 But the real killer was Kelsey's ice cold agressive driving style. Team captain and
mom Debbie stood behind Kelsey, giving directions, "Hit him, okay, now back off and give
him some room. Now hit him again!"
But the real killer was Kelsey's ice cold agressive driving style. Team captain and
mom Debbie stood behind Kelsey, giving directions, "Hit him, okay, now back off and give
him some room. Now hit him again!"
Kelsey executed flawlessly, and earned a lot of respect as a great driver.
 (11-May-2001)
We finalized the antenna mounting scheme for Ice Cube. For some unknown reason, on the
smaller robots, the big Vantec 36 is putting out too much RF noise, and the Futaba
receiver failsafe kicks in at short ranges. The workaround is the standard plastic
mounting panel for the Dean's antenna. The real question is why the bigger robots
work fine with a 1/4" hole and a rubber gromet in steel.
(11-May-2001)
We finalized the antenna mounting scheme for Ice Cube. For some unknown reason, on the
smaller robots, the big Vantec 36 is putting out too much RF noise, and the Futaba
receiver failsafe kicks in at short ranges. The workaround is the standard plastic
mounting panel for the Dean's antenna. The real question is why the bigger robots
work fine with a 1/4" hole and a rubber gromet in steel.
 (27-Apr-2001)
Today Debbie built 4 more battery packs for Ice Cube, so we have a spare set.
Each pack contains 5 pre-built 6-cell packs of 3000 mAhr NiMH cells. We use
Anderson powerpoles for the connectors, and wire nuts to connect the battery
leads together.
(27-Apr-2001)
Today Debbie built 4 more battery packs for Ice Cube, so we have a spare set.
Each pack contains 5 pre-built 6-cell packs of 3000 mAhr NiMH cells. We use
Anderson powerpoles for the connectors, and wire nuts to connect the battery
leads together.
 Last weekend, we had another driving practice session. We took a couple of
robot chewtoys with us, for target and pushing practice. One is a pool cleaner
that looks like Tentomushi.
The other is a 10 pound exercise weight covered in foam rubber and duct tape.
Last weekend, we had another driving practice session. We took a couple of
robot chewtoys with us, for target and pushing practice. One is a pool cleaner
that looks like Tentomushi.
The other is a 10 pound exercise weight covered in foam rubber and duct tape.
 (08-Apr-2001)
We added a couple of steel bars to the back of IceCube to serve as wheelie bars, and
tested the results driving
against SnowFlake
in the school parking lot.
Click on the right for an MPEG video of the rumble (4.4 mb).
(08-Apr-2001)
We added a couple of steel bars to the back of IceCube to serve as wheelie bars, and
tested the results driving
against SnowFlake
in the school parking lot.
Click on the right for an MPEG video of the rumble (4.4 mb).

 01-Apr-2001: We finally had our driving test of IceCube today. Click on the photo to the
right for video.
01-Apr-2001: We finally had our driving test of IceCube today. Click on the photo to the
right for video.
As we suspected, with only 14 pounds of downward force on the blade, IceCube can easily pop a wheelie. We have lots of weight left to add features, so we're designing a wheelie bar for the back to keep it under control.

 31-Mar-2001: Today was painting day at the Lazy Toad. Kelsey chose blue for Team Crystal,
so both the body and the blade will be a bright blue.
31-Mar-2001: Today was painting day at the Lazy Toad. Kelsey chose blue for Team Crystal,
so both the body and the blade will be a bright blue.
We also finished wiring the electronics, so once the paint is dry we can put the robot together for drive testing.
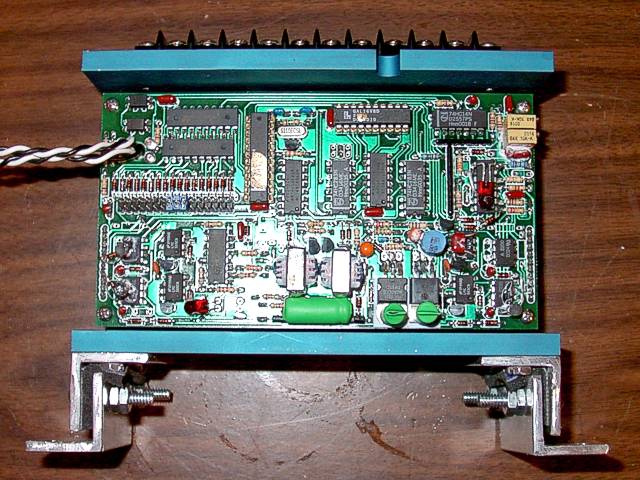 Here's a photo of the shock mount we made for Ice Cube's Vantec RDFR36e. We sandwiched a
rectangle of mouse pad between two pieces of angle aluminum. This keeps the critical
ESC 1" away from the body of the robot.
Here's a photo of the shock mount we made for Ice Cube's Vantec RDFR36e. We sandwiched a
rectangle of mouse pad between two pieces of angle aluminum. This keeps the critical
ESC 1" away from the body of the robot.

 27-Mar-2001: We got the snowplow for IceCube, today. We wasted no time mounting the two NPC 64038
motors, adding the rubber bumpers and blade mounts, and the photo on the right shows Kelsey
attaching the lid to the robot body.
27-Mar-2001: We got the snowplow for IceCube, today. We wasted no time mounting the two NPC 64038
motors, adding the rubber bumpers and blade mounts, and the photo on the right shows Kelsey
attaching the lid to the robot body.
The body, motors, wheels and blade together weigh 70 pounds. Since we're planning on 16 pounds of NiMH batteries, plus 3 for the speed control, we still have about 20 pounds to add either in terms of armor, secondary weapon, or ballast.
We'll make that decision after drive tests. The planned CG of Ice Cube is close enough to the wheels that this robot should be able to pop a wheelie in its current form.

 12-Mar-2001: We got the body and lid for IceCube, today. So we have our first
photos that show what Ice Cube will look like.
12-Mar-2001: We got the body and lid for IceCube, today. So we have our first
photos that show what Ice Cube will look like.
We originally planned a 4 wheeled bot powered by 2 NPC 60522 motors, but the fab shop lost our order for that body. We took that opportunity to try new motors, the NPC 64038's. The photo to the right shows inside the gearbox of the 64038: helical gears! The advantage of helical gears is that more than one tooth is in contact with the other gear at all times, making the gear assembly much quieter. We used helical gears at Westinghouse to drive the propellers on SSBN's. Cool!
Since we already have a 4 wheeled middleweight, Kelsey decided to try a 2 wheeled robot, similar to SnowFlake, but with larger wheels and body made of 1/8" steel:
Features:
 We got our Mauler-motor mounts for the DeWalt hammerdrill motors, but
we won't be using them in May's competition. We don't have enough
experience or trust in drill motor's, yet. The motor and mount combination weighs
5 lbs. 3.8 ounces, and is about 9 1/2 inches long.
We got our Mauler-motor mounts for the DeWalt hammerdrill motors, but
we won't be using them in May's competition. We don't have enough
experience or trust in drill motor's, yet. The motor and mount combination weighs
5 lbs. 3.8 ounces, and is about 9 1/2 inches long.
 Here we see Kelsey removing vestigial parts from the NPC 60522 motors. On the left, she removes the
magnetic brake from the rear of the motor.
Here we see Kelsey removing vestigial parts from the NPC 60522 motors. On the left, she removes the
magnetic brake from the rear of the motor.
The right photo shows what a BattleBot builder's living room looks like.
Clockwise from 6pm we see an NPC 60522 wheelchair motor, a ball peen hammer, an NPC Wheelchair Company shipping box, 4 Astroflight 112D battery chargers, 2 dozen nickel metal hydride battery packs, a Futaba 8UAPS transmitter (under the plastic bag), another NPC 60522 motor, a Pelouze 10 pound postal scale, a DeWalt 18V XR+ battery pack, two White-Rogers contactors (12V and 24V), a bottle of Pro-Lok thread lock compound, a Kubota industrial mower deck wheel with a McMaster 38 tooth sprocket on top, a Futaba 27 foot-pound servo, and a pile of 1/2" split shaft collars and a 1/2" steel rod.
Everything you need to build a BattleBot.

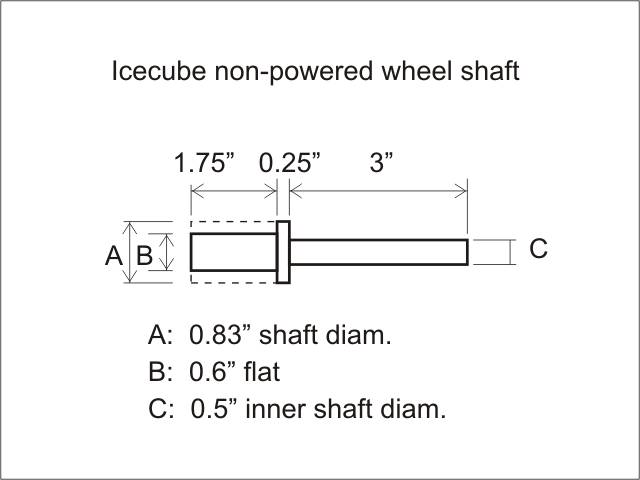 The original plan for IceCube represents our first robot with more wheels than motors. Since we've got
a huge investment in special purpose hubs for attaching Kubota mower wheels to NPC 60522 motor shafts,
e hit on the idea of making false axles that would fit Team Delta's pillow blocks. Dan at
Team Delta had just offered his services as machinist,
so we sent him the drawing on the right, and he sent us 6 axles.
The original plan for IceCube represents our first robot with more wheels than motors. Since we've got
a huge investment in special purpose hubs for attaching Kubota mower wheels to NPC 60522 motor shafts,
e hit on the idea of making false axles that would fit Team Delta's pillow blocks. Dan at
Team Delta had just offered his services as machinist,
so we sent him the drawing on the right, and he sent us 6 axles.
The hubs will have 22 tooth bicycle sprockets welded on, so we can use regular bicycle chains to give IceCube 4 wheel drive.