

This page describes Mini-Mauler, Danny's 12 pounder.
Check out Mini-Mauler's appearance in the Tri-Town News on May 2, 2002.
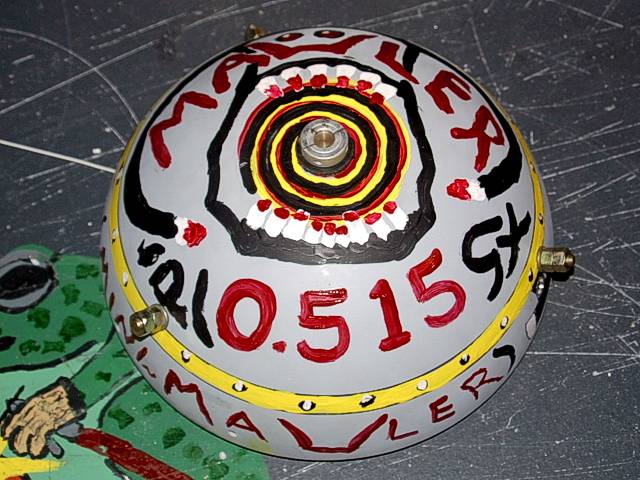
Since we don't get Danny until 5pm this Friday, he couldn't paint the new lid, so Kelsey was
pressed into service, and the results are eerily like the original. We did make one change...Morgan's
helpers for Season 4 inadvertently painted the Psychic Void backwards, so instead of sucking in the
opponent, it spewed psychic energy outward. It is my belief that this outward flow, made assymetric by
the face on one side, was the real cause of Mauler's dance at TI-2.
To avoid this fate, we kept the Psychic Void spinning inward.
He contacted his good friend, Supreme Commander Charles L. Tilford of the South Bay Robo-Warriors, and did in fact get permission to make “Mini-Mauler.” Then at iHXRC’01 in Chicago, Danny got to introduct Mini-Mauler to his namesake directly, since driver Morgan Tilford was a guest judge at the event, and brought Mauler as a display.
Unfortunately, a variety of factors combined to give 911 a victory:
In the loser's bracket, Mini-Mauler lost to Ryobot, a fast, ultra-low wedge that is a
very good spinner-killer.
The highlight of Danny's trip to Chicago for iHXRC, aside from winning second place, was getting to see his
old buddy General Morgan again. Even better was the chance to introduce Mini-Mauler to
his namesake. Becky Winter's presence at the event will no doubt revive those old rumors about Tentomushi
and Mauler having a lovechild.
We are not authorized at this time to confirm that Tentomushi is the mother,
nor can we explain any role that FrostBite may have had in this affair.
We also beefed up the antenna mounting. The tie wrap arrangement failed because the vibration turned
the holes into little saws, cutting even a large tie wrap. Now there is a small angle iron holding it.
Not much left to do...it weighs 11.91 pounds.
Next step is to add an on-off switch, a battery eliminator, and a few
lightening holes in the baseplate.
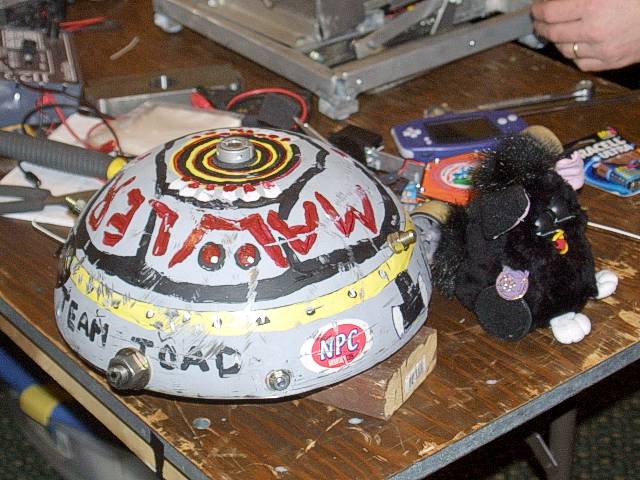
When Danny returns at the end of the month, we'll paint it to look like Mauler.
The biggest difference is that Mini-Mauler has a white "tail": six inches of Dean's
antenna running behind. The tail also shows which way the robot is "facing".
We took video of today's test; In this sequence of stills, you can see a small piece
of wood being split into two and flying off to the right at a calculated 40 miles per hour:

 (18-Mar-02)
For Season 4.0, Morgan repainted Mauler with a new look. We hadn't planned to redo Mini-Mauler,
but after the 12 pound rumble at CJRC'01, I just couldn't get Mini-Mauler to spin straight.
So after several attempts to balance the lid, I gave up and bought a whole new Martha Stewart
Tri-Ply Sit Fry Bowl.
(18-Mar-02)
For Season 4.0, Morgan repainted Mauler with a new look. We hadn't planned to redo Mini-Mauler,
but after the 12 pound rumble at CJRC'01, I just couldn't get Mini-Mauler to spin straight.
So after several attempts to balance the lid, I gave up and bought a whole new Martha Stewart
Tri-Ply Sit Fry Bowl.
 When Team Toad first set out to build a small robot the the NERC competitions, Danny asked to build a dome spinner. We bought a Martha Stewart 12” stainless steel tri-ply stir fry bowl, and considered the name “Martha Stewart’s Death Bowl,” but before we could start on the legal clearances, Danny asked to make his robot a copy of the BattleBot heavyweight robot, Mauler.
When Team Toad first set out to build a small robot the the NERC competitions, Danny asked to build a dome spinner. We bought a Martha Stewart 12” stainless steel tri-ply stir fry bowl, and considered the name “Martha Stewart’s Death Bowl,” but before we could start on the legal clearances, Danny asked to make his robot a copy of the BattleBot heavyweight robot, Mauler.
 (29-Sep-01)
We're back from CJRC-2001 in Philadelphia. Mini-Mauler didn't
do quite as well, winning 1 fight against Gimp (seen at right), and losing to 911 and Ryobot.
Since 911 has a titanium blade, and Mini-Mauler has been upgraded to 5/8" titanium bolts
for bot-knockers, the fight produced a lot of fireworks:
(29-Sep-01)
We're back from CJRC-2001 in Philadelphia. Mini-Mauler didn't
do quite as well, winning 1 fight against Gimp (seen at right), and losing to 911 and Ryobot.
Since 911 has a titanium blade, and Mini-Mauler has been upgraded to 5/8" titanium bolts
for bot-knockers, the fight produced a lot of fireworks:
 click to view 5 Mb Mpeg video
click to view 5 Mb Mpeg video
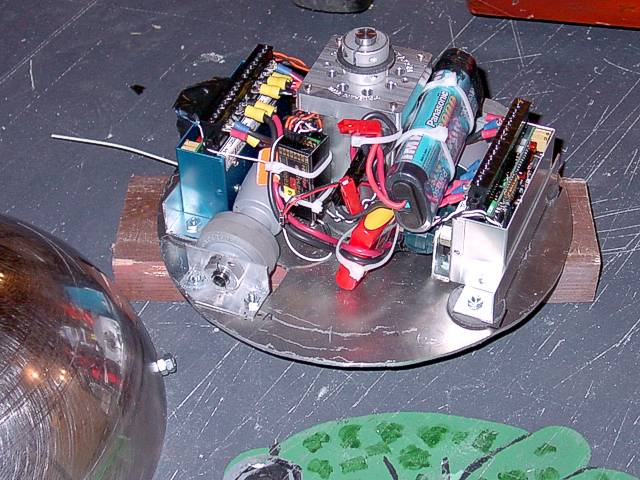
 The good news is that switch to Novak Reactor speed controllers solved the dome/speed controller
interference problem we had in Chicago. You can see the self-imposed destruction Mini-Mauler
suffered in the photo on the right. Vantec did a great job of turning around our repairs...all
three of the units in the photo have already been repaired and sent back to the Toad Ranch for
use in other robots.
The good news is that switch to Novak Reactor speed controllers solved the dome/speed controller
interference problem we had in Chicago. You can see the self-imposed destruction Mini-Mauler
suffered in the photo on the right. Vantec did a great job of turning around our repairs...all
three of the units in the photo have already been repaired and sent back to the Toad Ranch for
use in other robots.
 (13-Sep-01)
We're back from iHXRC-2001 in Chicago. Mini-Mauler took second place,
beating ForkBot, 911, and Dizzy-Dragon by knockouts. Mini-Mauler lost twice to Tyrant, driven by
Al Kindle (seen in the photo to the right).
(13-Sep-01)
We're back from iHXRC-2001 in Chicago. Mini-Mauler took second place,
beating ForkBot, 911, and Dizzy-Dragon by knockouts. Mini-Mauler lost twice to Tyrant, driven by
Al Kindle (seen in the photo to the right).
--Supreme Commander Charles L. Tilford, PE,
BBots Forum, Post 3961.12, 28-Nov-2000




 (31-Aug-01)
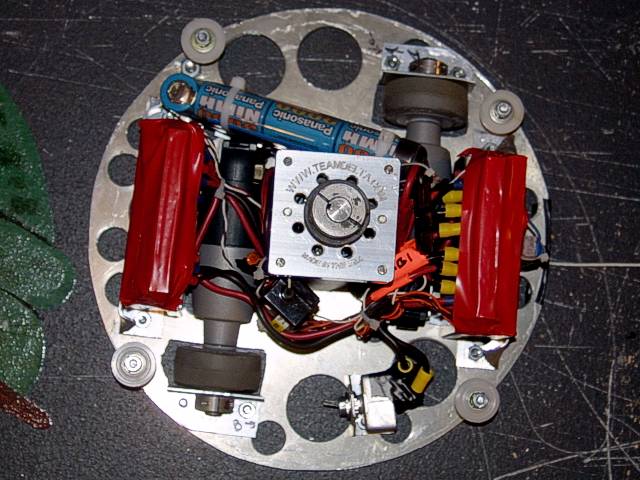
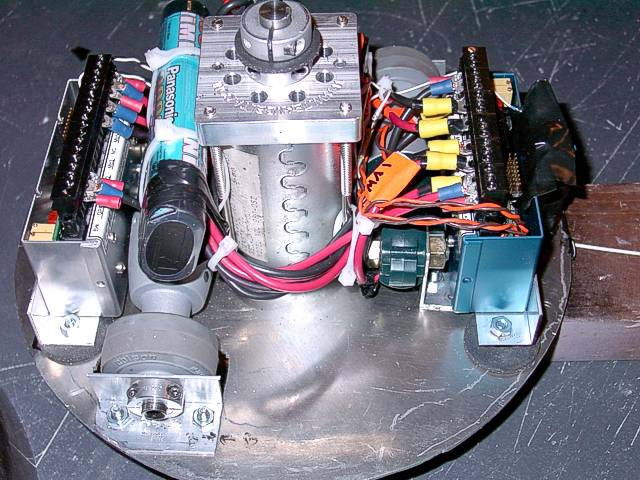
Okay, Mini-Mauler is up to competition shape and ready for battle. We got the on-off switch mounted,
replaced the receiver battery with a 7805 chip, and attacked the baseplate with several different
holw saws. As you can see in the photo on the left, even small parts got lots of attention from the
drill. With the extra available weight, we added rollers around the outside (to keep the shell away
from the Vantecs) and upgraded from a 6-cell NiMH pack to a 7-cell NiMH pack.
(31-Aug-01)
Okay, Mini-Mauler is up to competition shape and ready for battle. We got the on-off switch mounted,
replaced the receiver battery with a 7805 chip, and attacked the baseplate with several different
holw saws. As you can see in the photo on the left, even small parts got lots of attention from the
drill. With the extra available weight, we added rollers around the outside (to keep the shell away
from the Vantecs) and upgraded from a 6-cell NiMH pack to a 7-cell NiMH pack.
 (27-Jul-01)
Dan and I painted the shell today...beware of the psychic voidlet!
(27-Jul-01)
Dan and I painted the shell today...beware of the psychic voidlet!
 (15-Jul-01)
We had the first weapon's test of Mini-Mauler today.
We mounted the Vantecs with angle aluminum and rubber bumpers, and tie-wrapped the
receiver, receiver battery, and drive batteries. The total weight is at 11 pounds 10.4 ounces.
The shell is mounted on the motor shaft between two split-shaft collars.
(15-Jul-01)
We had the first weapon's test of Mini-Mauler today.
We mounted the Vantecs with angle aluminum and rubber bumpers, and tie-wrapped the
receiver, receiver battery, and drive batteries. The total weight is at 11 pounds 10.4 ounces.
The shell is mounted on the motor shaft between two split-shaft collars.
 We use a rubber washer as a "clutch" to transfer the torque from the
shaft collars, which turn with the motor, to the shell.
Since we use a Vantec to control the drive motor, the shell can spin either direction.
We attached a couple of 1/4" machine screws to the rim to act as "bot-knockers".
We use a rubber washer as a "clutch" to transfer the torque from the
shaft collars, which turn with the motor, to the shell.
Since we use a Vantec to control the drive motor, the shell can spin either direction.
We attached a couple of 1/4" machine screws to the rim to act as "bot-knockers".



We have 3 new videos, a Quicktime 5.3mb, Small RealMedia 0.24 mb, and the original digital camera AVI 1.9 mb.

 (13-Jul-01)
Tonight we had the first drive test of the shell-less Mini-Mauler.
Click on the right image to see the video (3.1 MB digital camera AVI).
(13-Jul-01)
Tonight we had the first drive test of the shell-less Mini-Mauler.
Click on the right image to see the video (3.1 MB digital camera AVI).
The good news is that the offset wheels don't seem to hamper the robot's turning ability. Because the spinner motor occupies the entire center of the robot, the drive wheels are not centered.
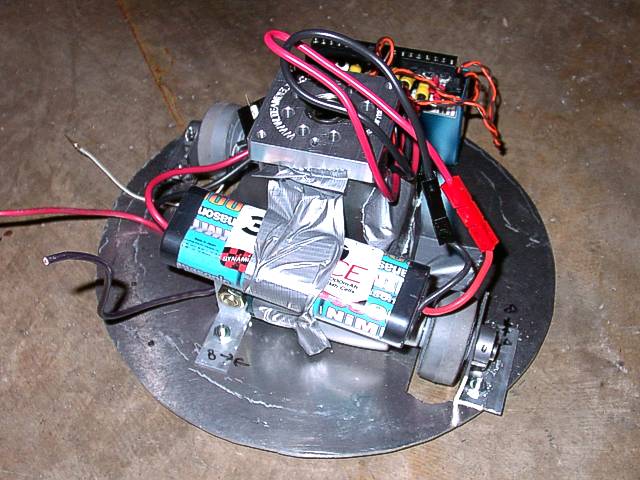
 The photo on the left shows the duct tape version of the drive train. The motors are mounted
using the final mounts, but the Vantec, battery and receiver are held by duct tape.
To the right is the POP version, before cutting the wheel holes in the base plate (1/8"
6061 aluminum). The weight right now is 11 lbs 10 oz.
The photo on the left shows the duct tape version of the drive train. The motors are mounted
using the final mounts, but the Vantec, battery and receiver are held by duct tape.
To the right is the POP version, before cutting the wheel holes in the base plate (1/8"
6061 aluminum). The weight right now is 11 lbs 10 oz.

 (11-Jul-01)
Spin test 2 was completed last night. We took off the prototype test bowl (1 pound of
steel) and put on the real Martha Stewart bowl (3 pounds of stainless).
We clocked it at 2,100 rpm running at 7.4 volts.
To the right, you see the 2" Colson wheels mounted on Mini-Mauler's screwdriver motors.
(11-Jul-01)
Spin test 2 was completed last night. We took off the prototype test bowl (1 pound of
steel) and put on the real Martha Stewart bowl (3 pounds of stainless).
We clocked it at 2,100 rpm running at 7.4 volts.
To the right, you see the 2" Colson wheels mounted on Mini-Mauler's screwdriver motors.

 (09-Jul-01)
Dan is building a 12 pound spinner for iHXRC in September.
We considered calling it "Martha Stewart's Death Bowl", but Danny asked for,
and got, Supreme Commander Tilford's permission to call his robot "Mini-Mauler",
and to paint it to look like Mauler.
A big thank-you to SC for being nice to Danny. To the right, you can see that
Danny has completely surrendered to the Dark Side of the Force.
(09-Jul-01)
Dan is building a 12 pound spinner for iHXRC in September.
We considered calling it "Martha Stewart's Death Bowl", but Danny asked for,
and got, Supreme Commander Tilford's permission to call his robot "Mini-Mauler",
and to paint it to look like Mauler.
A big thank-you to SC for being nice to Danny. To the right, you can see that
Danny has completely surrendered to the Dark Side of the Force.
 So far we've verified that the Jensen motor can directly drive a 1 pound mixing bowl,
and we're moving up to the 3 pound Martha Stewart bowl. We plan to use a Vantec 23
to control the Jensen, because the Vantec actually weighs less than an appropriately
rated relay.
So far we've verified that the Jensen motor can directly drive a 1 pound mixing bowl,
and we're moving up to the 3 pound Martha Stewart bowl. We plan to use a Vantec 23
to control the Jensen, because the Vantec actually weighs less than an appropriately
rated relay.
We originally planned to use Kiddie Car motors, but found they were too heavy to keep us under the 12 pound limit.
Features:
Back to TeamToad BattleBots Home Page